About me
Welcome to my website!
I am a Robotics Software Engineer at Mostavio designing an autonomous 250 kg electric Vertical Take-Off and Landing (eVTOL) platform. Building the path to sustainable zero-emission electric aviation.
I have a Bachelor of Applied Science in Engineering Science with a Major in Robotics & a Minor in AI at the University of Toronto. During my time, I was leading UTRA Robosoccer, Canada’s first undergraduate-led humanoid robotics team where we design humanoid robots to autonomously play soccer. I’m still mentoring the team as we prepare for RoboCup 2025!
My research interest focus on reinforcement learning, optimal control, and state estimation to bring robotics to the real world.
Lately I’ve also been getting into running and will be running the Toronto half-marathon in May.
Experience
Mostavio
Leading the development of autonomy, motion planning, and sensor fusion systems for a 250 kg electric Vertical Take-Off and Landing (eVTOL) platform using ROS2, Python, C++, and Gazebo.

Research on Reinforcement & imitation Learning for Soccer Skills
Supervised by Professor Michael Guerzhoy, I Developed a novel approach for training humanoid robots in soccer-specific tasks using Deep Reinforcement Learning (RL), Proximal Policy Optimization (PPO), and Adversarial Motion Priors (AMP).
| Walking Task | Kicking Task | Jumping Task |
|---|---|---|
Video | Video | Video |
Autonomous UAV for Nuclear Safety Inspections Capstone
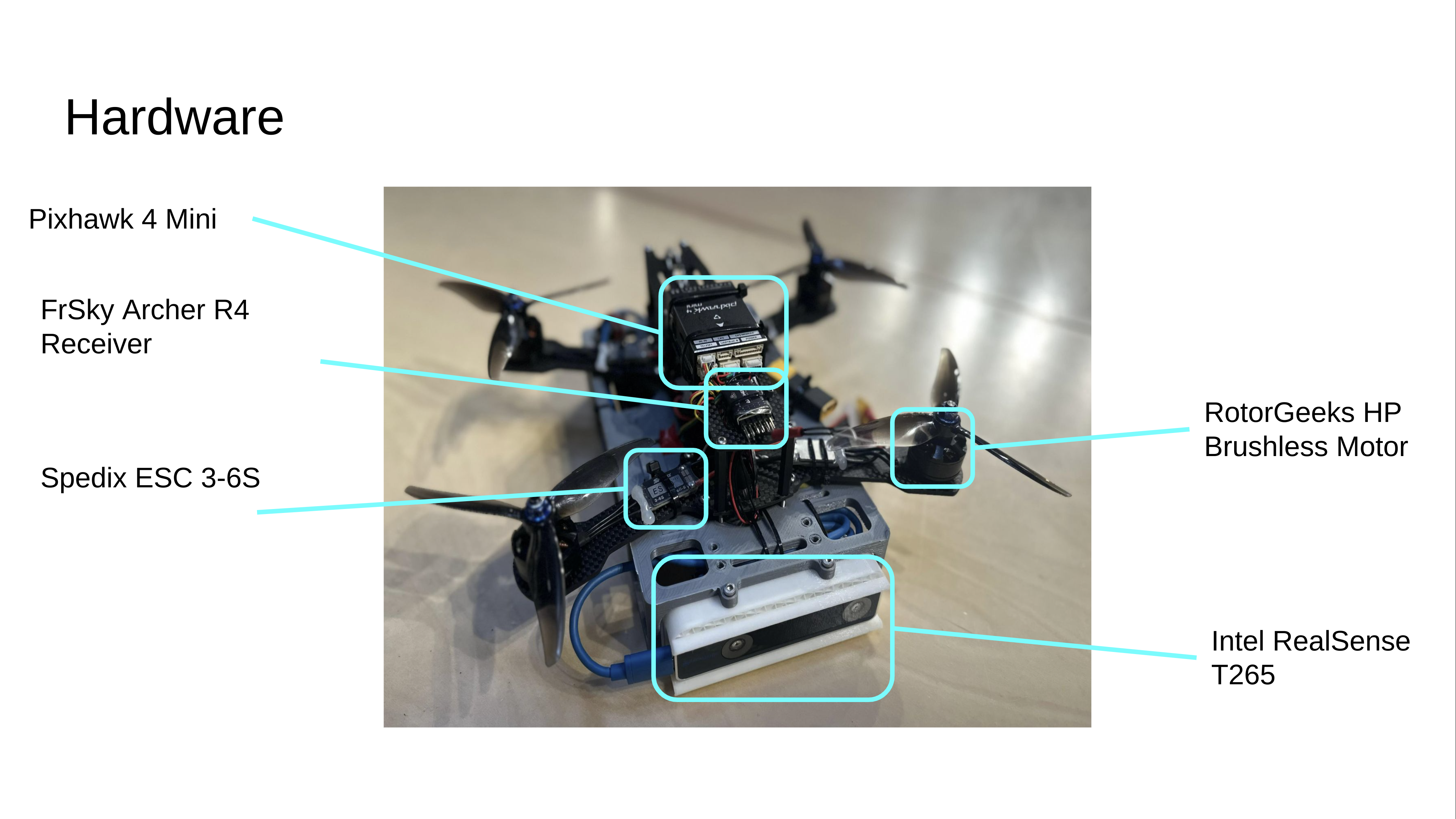
Designed and developed a cutting-edge drone for nuclear safety inspections. Equipped with CV object detection (YoloV5), the drone can read critical data from radiated zones, while its visual SLAM enables accurate localization, RRT* allows for obstacle-free path planning and precise way-point motion planning for navigation through these zones.
Assembled Drone
UTRA RoboSoccer Highlights
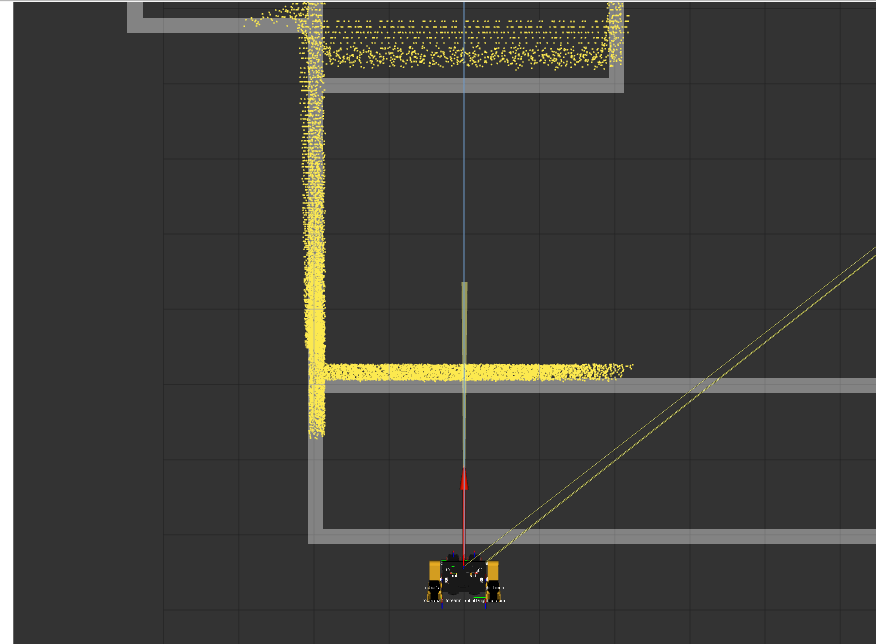
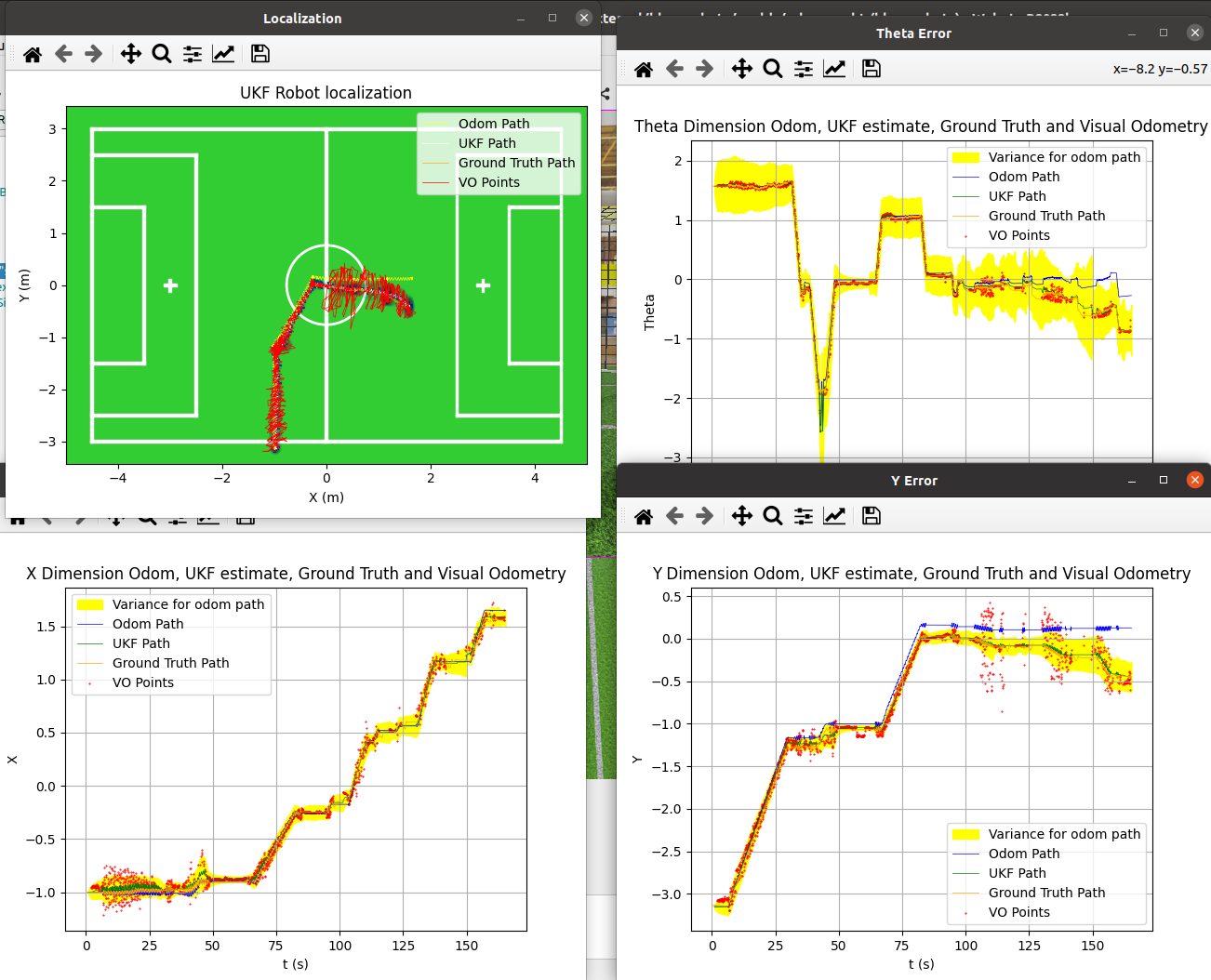
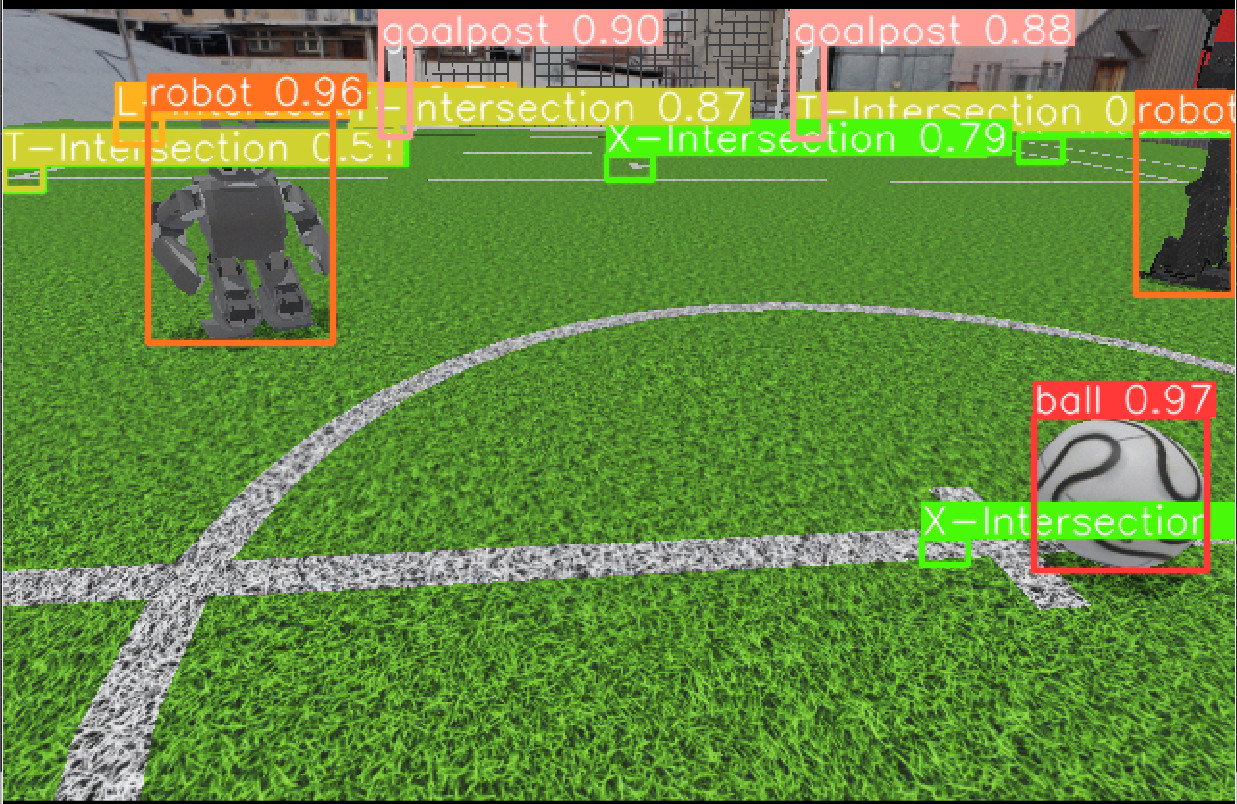
Led a team of 30 engineers under faculty advisors Prof. Jonathan Kelly and Prof. D’Eleuterio, securing 4th place at RoboCup 2023 in Bordeaux, France. Developed an Iterative Closest Point (ICP) algorithm for visual odometry, integrating field line detection via OpenCV and ROS2, and fused data with an Unscented Kalman Filter (UKF) for precise localization. Applied YOLOv5 for real-time object detection (balls, robots, field markers, goalposts), optimizing performance with a diverse simulated dataset and successfully transferring the model to real-world conditions.
Robot Capabilities
Qualification Video

Short Clip

Unscented Kalman Filter (UKF)
Object Detection (Yolov5)
Field Line Detection
Field Lines

Point Cloud